Fundamentos del análisis de estabilidad en el sentido de Lyapunov#
Considere un sistema autónomo representado por la siguiente ecuación
donde \(f:D\leftarrow R^{n}\) es un mapa local de Lipschitz de un dominio \(D\subset R^{n}\) en \(R^{n}\).
Para poder estudiar la estabilidad del sistema (35), es necesario obtener \(\bar{x}\in D\) que denota el punto de equilibrio
Localización de los puntos de equilibrio#
Definition 1
El punto de equilibrio \(x=0\) de \(\dot{x} = f(x)\) es
estable si, para cada \(\varepsilon >0\), hay un \(\delta = \delta(\varepsilon)>0\) tal que
inestable si no es estable.
asintóticamente estable si este es estable y \(\delta\) se escoge tal que.
Ejemplo 1.#
Considere las ecuaciones del péndulo simple y obtenga sus puntos de equilibrio
Linealización de sistemas en torno a un punto de equilibrio#
Un sistema (LTI) de la forma
tiene un punto de equilibrio en el origen. Este punto de equilibrio está aislado si y sólo si \(\text{det}(A)\neq0\). Si \(\text{det}(A)=0\), la matriz \(A\) tiene un espacio nulo no trivial.
Las propiedades de estabilidad del origen pueden ser caracterizadas por las ubicaciones de los eigenvalores de la matriz \(A\).
Recordemos que la solución al sistema \(\dot{x}=Ax\) dada una condición inicial \(x_{0}\) está dada como sigue
Además, para cualquier matriz \(A\) existe una matriz \(P\) no \myindex{singular} que transforma \(A\) en su forma de Jordan, i.e.
donde \(J_{i}\) es el bloque de Jordan asociado con el eigenvalor \(\lambda_{i}\) de A.
La forma generalizada del bloque de Jordan, considerando un orden \(m\), tiene la forma siguiente
por consiguiente
donde \(m_{i}\) es el orden del bloque de Jordan asociado con el eigenvalor \(\lambda_{i}\).
Theorem 6
El punto de equilibrio \(x=0\) de \(\dot{x} = Ax\) es estable si y sólo si todos los eigenvalores de \(A\) satisfacen \(\text{Re}(\lambda_{i})\leq 0\) y cada eigenvalor con \(\text{Re}(\lambda_{i})= 0\) tiene un bloque de Jordan asociado de uno. El punto de equilibrio \(x=0\) es (globalmente) asintóticamente estable sí y sólo sí todos los eigencalores de \(A\) satisfacen \(\text{Re}(\lambda_{i})< 0\).
La demostración de este teorema se puede consultar en Khalil (2002).
Linealización#
Suponga que las funciones \(f_{1}\) y \(f_{2}\) del sistema autónomo de segundo orden
son continuamente diferenciables y que además \(p=(p_{1},p_{2})\) es un punto de equilibrio, el sistema (37) se puede expandir mediante serie de Taylor en torno a \((p_{1},p_{2})\) como sigue
donde
y H.O.T. denota los términos de orden superior de la expansión de Taylor, es decir \((x_{1}-p_{1})^{2},(x_{2}-p_{2})^{2},(x_{1}-p_{1})\times (x_{2}-p_{2})\), y así sucesivamente.
Dado que \((p_{1},p_{2})\) denota el punto de equilibrio, tenemos
Puesto que consideramos trayectorias cercanas a este punto, definimos
Por consiguiente, las ecuaciones de estado quedan de la siguiente forma
Si consideramos una vecindad cercana al punto de equilibrio, entonces podemos decir que los términos H.O.T son despreciables y por consiguiente, realizamos una aproximación de la ecuación de estado no lineal por la ecuación de estado lineal como sigue
Reescribiendo lo anterior en una forma vectorial, tenemos
donde
Note
La matrix \([\partial f/\partial x]\) es llamada la matriz Jacobiana de \(f(x)\) mientras que \(A\) es la matriz Jacobiana evaluada en el punto de equilibrio \(p\).
Ejemplo
Considere el circuito de diodo tunel que se muestra a continuación
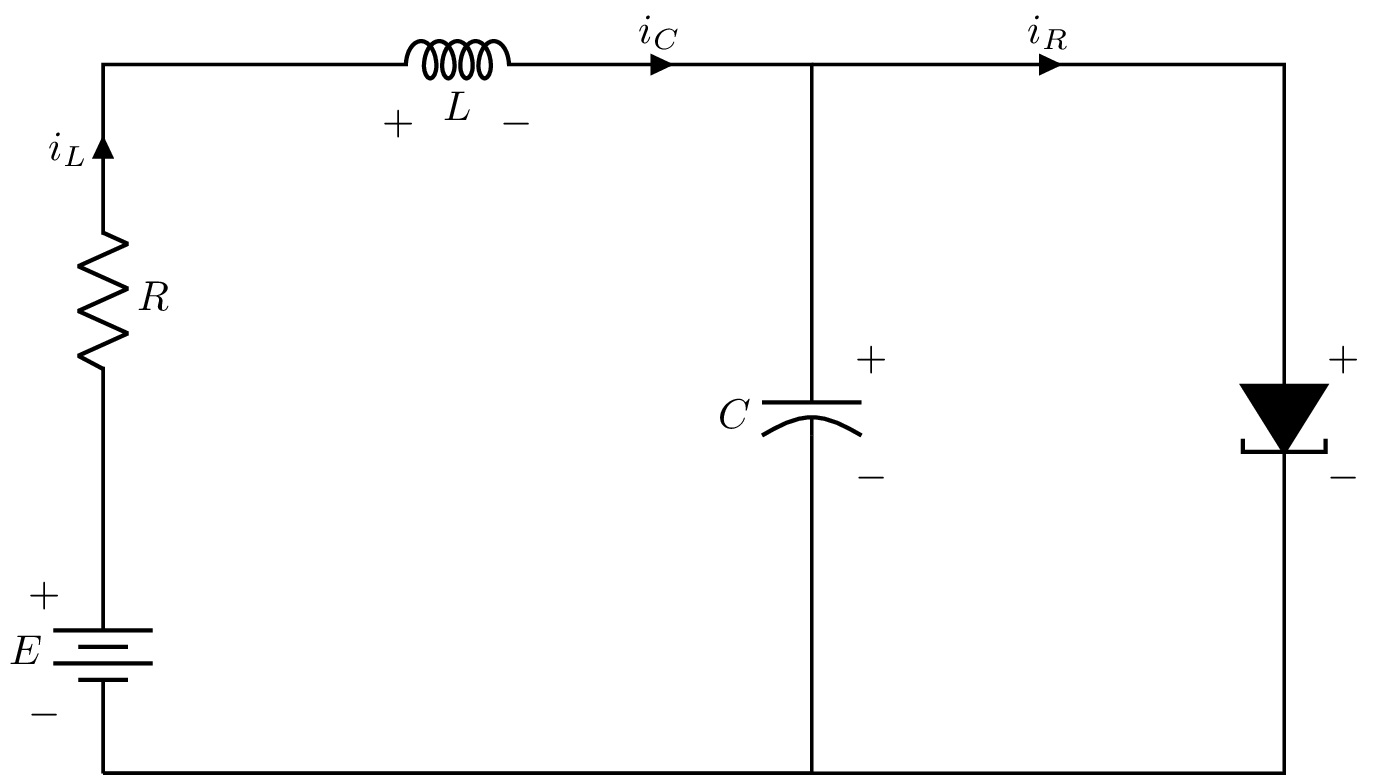
Fig. 7 Diodo túnel.#
donde los elementos de almacenamiento de energía son el capacitor \(C\) y el inductor \(L\) mientras que el diodo tunel es representado por la relación \(i_{R} = h(v_{R})\). Asumiendo que los elementos del circuito son lineales e invariantes en el tiempo, el circuito de diodo tunel se puede representar matemáticamente como sigue
donde \(i\), \(v\) representan la corriente y el voltaje a través de los elementos, respectivamente.
Considere que los parámetros del modelo son \(u=1.2V\), \(R=1.5k\Omega = 1.5\times 10^{3}\Omega\), \(C=2pF = 2\times 10^{-12}F\), \(L=5\mu H = 5\times 10^{-6}H\). Además, suponga que \(h(\cdot)\) está dada por
Utilice las Leyes de Kirchhoff para reescribir las ecuaciones anteriores.
Encuentre los puntos de equilibrio.
Linealice el sistema.
Evalúe la matriz Jacobiana en los puntos de equilibrio.
Ejemplo
Considere el péndulo simple mostrado en la siguiente
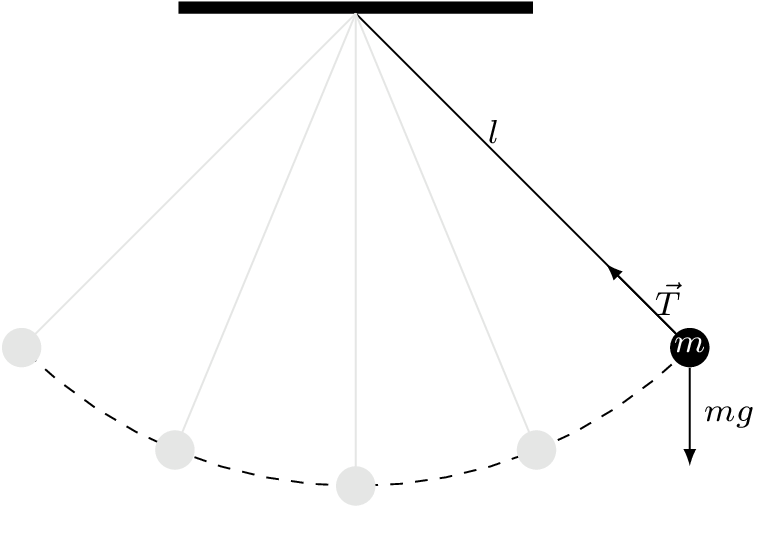
Fig. 8 Diagrama de péndulo simple sin fuerza externa.#
donde \(l\) denota la longitud de la varilla, y \(m\) la masa de la bola.
Cuya representación en espacio de estados está dada como sigue
Encuentre los puntos de equilibrio.
Linealice el sistema.
Evalúe la matriz Jacobiana en los puntos de equilibrio.
Análisis de la estabilidad de sistemas dinámicos linealizados#
Considere un sistema LTI como se muestra en la Ec. (36) donde \(A\) es una matriz real de dimensión \(2\times 2\). La solución a este sistema con una condición inicial \(x_{0}\) está dada por la siguiente ecuación
donde \(J_{r}\) es la forma real de Jordan de \(A\) y \(M\) es una matriz real no singular tal que \(M^{-1}AM = J_{r}\). Dependiendo de los eigenvalores \(\lambda_{i}\) de la matriz \(A\), la forma de Jordan puede tomar los siguientes casos
donde \(k\) puede tomar el valor de \(0\) o \(1\).
Caso 1. Ambos eigenvalores son reales: \(\lambda_{1} \neq \lambda_{2} \neq 0\).#
El sistema tiene dos eigenvectores reales \(v_{1}\) y \(v_{2}\) asociados con \(\lambda_{1}\) y \(\lambda_{2}\), respectivamente. Donde el sistema es transformado en dos ecuaciones diferenciales de primer orden después de un cambio de coordenadas \(z=M^{-1}x\), i.e.
cuya solución está dada como sigue, para las condiciones iniciales \((z_{10},z_{20})\)
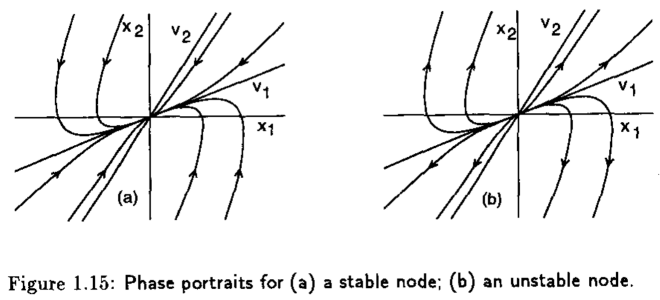
Cuando \(\lambda_{2}<\lambda_{1}<0\), el retrato fase tiene la forma de la Figura 1.15(a), donde \(x=0\) es llamado nodo estable. Por otro lado, si \(\lambda_{2}>\lambda_{1}>0\), \(x=0\), el retrato fase se muestra en la Figura 1.15(b) y se le conoce como nodo inestable.
Si el sistema tiene eigenvalores con signos opuestos, esto es \(\lambda_{2} < 0 \lambda_{1}\), decimos que \(\lambda_{2}\) es un eigenvalor estable y \(\lambda_{1}\) inestable. Por consiguiente, el retrato fase que corresponde a esta trayectoria se muestra en la Figura 1.16(a).

Caso 2. Eigenvalores complejos: \(\lambda_{1,2} = \alpha \pm j\beta\)#
El sistema \(\dot{x}=Ax\) después de la transformación de coordenadas \(z = M^{-1}x\) tiene la forma
Puesto que la solución a este sistema es oscilatoria, se puede expresar en coordenadas polares como sigue
teniendo dos ecuaciones diferenciales de primer orden desacopladas
La solución de este sistema, para una condición inicial \((r_{0},\theta_{0})\) es
Dependiendo del valor de \(\alpha\), el retrato fase puede tomar alguna de las siguientes formas
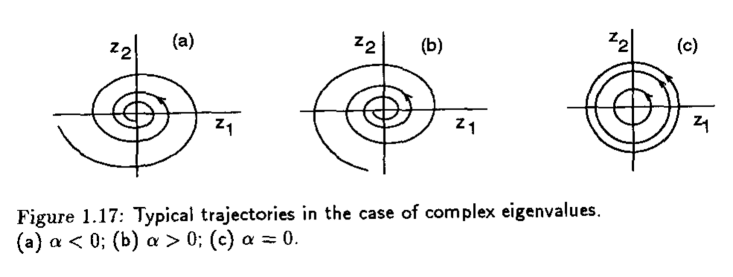
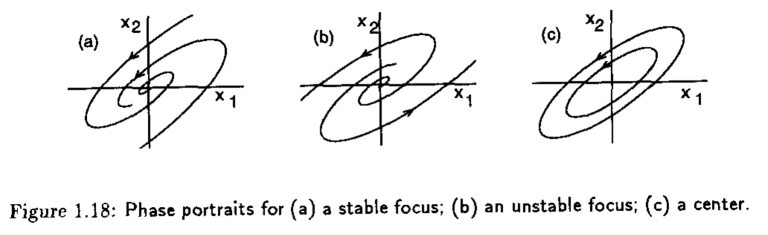
Note
El punto de equilibrio \(x=0\) es un foco estable si \(\alpha<0\), foco inestable si \(\alpha>0\) y centro si \(\alpha=0\) como se muestra a continuación
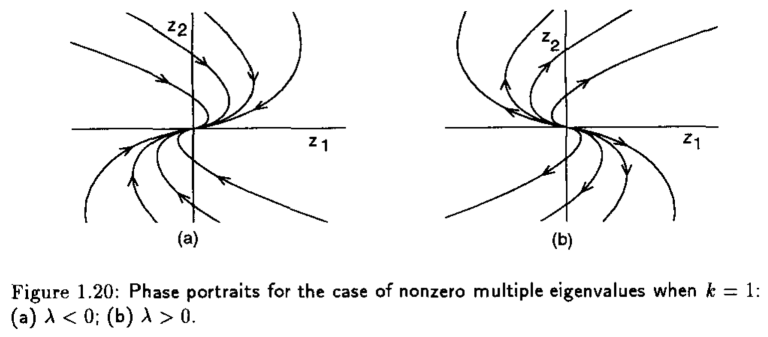
Caso 3. Eigenvalores múltiples diferentes de cero: \(\lambda_{1}=\lambda_{2} = \lambda \neq 0\)#
Para este caso, el sistema \(\dot{x}=Ax\) después de un cambio de coordenadas toma la siguiente forma
cuya solución, con c.i. \((z_{10},z_{20})\) está dada como sigue
Los retrato fase para este caso, considerando \(k=0\) y \(k=1\) se muestran en la siguiente figura
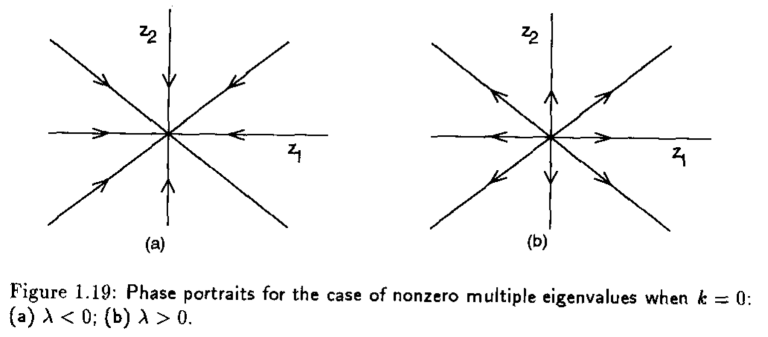
Aquí, el punto de equilibrio \(x=0\) se le conoce como nodo estable si \(\lambda < 0\) y nodo inestable si \(\lambda >0\). Las trayectorias se muestran en la siguiente representación
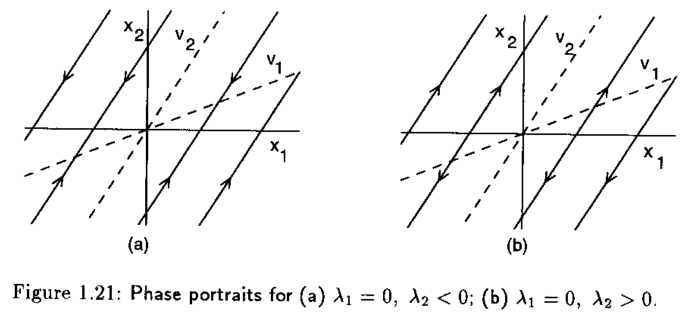
Caso 4. Uno o ambos autovalores son cero#
Cuando \(\lambda_{1}=0\) y \(\lambda_{2}\neq 0\), el sistema después de una transformación de coordenadas tiene la siguiente representación
cuya solución es
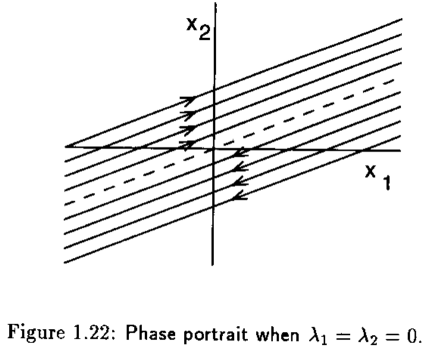
Cuano ambos eigenvalores se encuentran en el origen y se aplica una transformación del coordenadas al sistema \(\dot{x}=Ax\), tenemos
cuya solución está dada como sigue
Las trayectorias que forman el retrato fase para estos casos en particular se muestran en la siguientes figuras
Ejemplo
Clasifique los puntos de equilibrio del circuito de diodo tunel (38) y determine su estabilidad.
Ejemplo
Clasifique los puntos de equilibrio del sistema de péndulo simple (39) y determine su estabilidad.
Análisis de estabilidad por el método directo de Lyapunov#
Aleksandr Mikhailovich Lyapunov en 1892 presentó dos métodos para determinar la estabilidad de sistemas dinámicos representados en ecuaciones diferenciales ordinarias (ODEs).
El primer método utiliza la forma explícita de la solución de las ODEs para realizar el análisis de estabilidad mientras que el segundo método determina la estabilidad del sistema sin resolver las ecuaciones de estado.
Sea \(V:D\rightarrow R\) una función continuamente diferenciable definida en un dominio \(D\subset R^{n}\) que contiene el origen, entonces la derivada de \(V\) sobre la trayectoria del sistema autónomo \(\dot{x}=f(x)\), denotada por \(\dot{V}(x)\) está dada como sigue
Normalmente las funciones utilizadas son funciónes reales de variable vectorial. También es posible utilizar funciones integrales pero nos vamos a centrar en las primeras.
Definition 2
Una función \(V\) es definida positiva si \(V(x)>0 ~ \forall x\neq 0\) y \(V(0)=0\).
Ejemplos
\(V(x) = x_{1}^{2} + 2x_{2}^{2}\)
\(V(x) = x_{1}^{2} + \frac{2x_{2}^{2}}{1+x_{2}^{2}}\)
Definition 3
Una función \(V\) es definida negativa si \(V(x)<0 ~ \forall x\neq 0\) y \(V(0)=0\).
Ejemplo
\(V(x) = - x_{1}^{2} - \left(3x_{1}+2x_{2}\right)^{2}\)
Definition 4
Una función \(V\) es semidefinida positiva si \(V(x)\geq0 ~ \forall x\) y \(V(x)=0\).
Ejemplo
\(V(x) = \left(x_{1} + x_{2} \right)^{2}\).
Definition 5
Una función \(V\) es semidefinida negativa si \(-V(x)\) es semidefinida positiva, i.e. \(-V(x)\geq0 ~ \forall x\) y \(V(x)=0\).
Ejemplo
\(V(x) = -\left(x_{1} + x_{2}\right)^{2}\)
Note
\(\dot{V}(x)\) es diferente para cada sistema y además, si \(\Phi(t;x)\) es la solución al sistema \(\dot{x}=f(x)\) con valor inicial \(x\) en \(t=0\), entonces
Ejemplo
Considere la siguiente función
Ejemplo
Considere la siguiente función y determine si es definida positiva o semidefinida positiva
Ejemplo
Considere la siguiente función y determine si es definida negativa
Ejemplo
Considere la siguiente función
Formas cuadráticas#
Una forma general de tener funciones \(V(x)\) es utilizando la forma cuadrática. Por ejemplo
donde \(P\) es una matriz simétrica. Es decir \(P = P^{T}\). O bien, de la forma hermitiana
Ejemplo
Considere la siguiente función en forma cuadrática y determine si es definida positiva
Criterio de Sylvester#
Una función \(V(x)\) en forma cuadrática
o hermitiana
es definida positiva si todas las menores principales sucesivas de \(P\) son positivas.
Ejemplo
Considere la siguiente matriz \(P\)
Ejemplo
Considere la siguiente función y determine si es definida positiva
Principio del Teorema de Estabilidad de Lyapunov#
Un sistema es estable si su \(E\) -energía- total (una función definida positiva) es continuamente decreciente (la derivada en el tiempo de la \(E\) total es definida negativa) hasta que alcanza un estado de equilibrio. En otras palabras, un sistema es estable si su \(E\) total se va perdiendo con el paso del tiempo.
Theorem 7 (Teorema de estabilidad de Lyapunov)
Sea \(x=0\) un punto de equilibrio para el sistema \(\dot{x}=f(x)\) y \(D\subset R^{n}\) un dominio que contiene \(x=0\), entonces \(V:D\rightarrow R\) es una función continuamente diferenciable tal que
Entonces, \(x=0\) es estable. Además, si
entonces \(x=0\) es asintóticamente estable.
La demostración de este teorema se puede consultar en Khalil (2002).
Función candidata de Lyapunov#
Es aquella función que se propone para poder realizar el análisis de estabilidad de Lyapunov. Recordemos que anteriormente trabajamos con funciones definidas positivas y cómo verificar que cumplieran con la definición mas no con funciones candidatas de Lyapunov.
En términos estrictos, una función candidata de Lyapunov es una función definida positiva. Esta función definida positiva puede ser de manera local o global. En nuestro caso, consideramos que es local. Esto es
donde \(U\) denota un conjunto del espacio de estados y \(\backslash \{0\}\) significa excepto en el origen.
Note
Recordemos que el valor \((0,0)\) se refiere al origen del sistema que puede ser un punto de equilibrio. Cuando linealizamos un sistema no lineal en un punto de equilibrio que no sea el origen, entonces el origen del sistema lineal es el punto de equilibrio del sistema lineal.
Ejemplo
Considere el siguiente sistema, y verifique si es estable o no en el sentido de Lyapunov
Ejemplo
Considere el sistema de péndulo simple sin fricción
donde \(x = \begin{bmatrix} x_{1} \\ x_{2} \end{bmatrix} = \begin{bmatrix} \theta \\ \dot{\theta} \end{bmatrix}\).
Theorem 8
Sea \(x=0\) un punto de equilibrio para el sistema \(\dot{x} = f(x)\) y \(V:\mathbb{R}^{n}\rightarrow \mathbb{R}\) una función continuamente diferenciable tal que
entonces \(x=0\) es globalmente asintóticamente estable.
Ejemplo
Considere el siguiente sistema no lineal escalar
Ejemplo
Considere las ecuaciones que caracterizan un modelo para un péndulo colgante
donde \(x_{1}\) denota el ángulo entre el péndulo y la vertical con \(x_{1}>0\) corresponde a la rotación en sentido contrario a las manecillas del reloj.