Controlabilidad de sistemas dinámicos#
Concepto de controlabilidad#
Considere un sistema \(n\)-dimensional en representación de espacio-estado
donde \(A\), \(B\), \(C\) son matrices de dimensión \(n\times n\), \(n\times 1\), y \(1\times n\), respectivamente. Además, \(D\) es escalar.
Definition 6
El sistema (40) es controlable si cualquier estado se puede transferir a cualquier otro estado en un tiempo finito aplicando una entrada.
Theorem 9
Para cada \(y\), existe una solución \(x\) en \(Ax=y\) si y sólo si \(A\) es de rango completo.
Recordemos que la solución al sistema (40) dado una entrada \(u(t)\) y una c.i. \(x(0)\) está dado como sigue
y
Reescribiendo (41), tenemos
Utilizando el Theorem 9, tenemos que para cualquier \(x(0)\) y \(x(t)\), una solución \(u(t)\) existe si y sólo si la matriz
tiene rango \(n\).
Utilizando el teorema de Cayley-Hamilton, la matriz (42) tiene rango \(n\) si y sólo si la matriz \(n\times n\)
tiene rango \(n\).
En resumen, el sistema (40) es controlable si la matriz (43) tiene rango \(n\), o bien, \(\text{det}\{U\} \neq 0\).
Note
La matriz (43) es llamada matriz de controlabilidad.
Ejemplo
Considere la siguiente función de transferencia
Ejemplo
Considere la siguiente función de transferencia
Ejemplo
Considere el sistema de equilibrio que se muestra en la siguiente Figura.
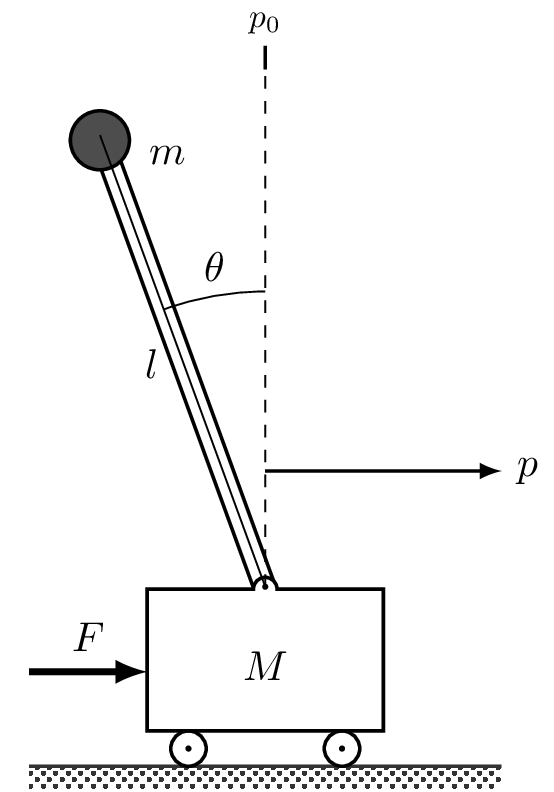
Fig. 9 Modelo del sistema carro-péndulo.#
En este ejemplo, el centro de masa se equilibra por encima de un punto de pivote. Un ejemplo de ello se puede ver en la película “Guardia de supermercado”.

Fig. 10 Paul Blart. Guardia de supermercado.#
El modelo no lineal para el sistema de equilibrio se muestra a continuación
donde \(M\) es la masa de la base, \(m\) y \(J\) la masa y el momento de inercia del sistema a ser balanceado. Además, \(l\) denota la distancia de la base al centro de masa del cuerpo balanceado, \(c\) y \(\gamma\) son los coeficientes de fricción viscosa así como \(g\) representa la aceleración debido a la gravedad.
La dinámica del sistema en espacio de estado se puede obtener considerando como variables de estado\(x = (p,\theta,\dot{p},\dot{\theta})\), la entrada como \(u=F\) y salida como \(y=(p,\theta)\).
Si definimos la masa total y la inercia total como sigue, tenemos
Por consiguiente, podemos representar las ecuaciones de movimiento como sigue
donde \(c_{\theta} = \cos(\theta)\) y \(s_{\theta} = \sin(\theta)\).
En ocaciones, el ángulo \(\theta\) puede ser cercano a \(0\). Por consiguiente, podemos hacer las siguientes suposiciones: \(\sin(\theta) \approx \theta\) y \(\cos(\theta) \approx 1\). Además, si \(\dot{\theta}\) es pequeño, entonces se puede menospreciar los términos cuadráticos y superiores en \(\dot{\theta}\).
Reescribiendo el sistema a partir de estas suposiciones, tenemos
donde \(\mu = M_{t}J_{t} - m^{2}l^{2}\). Además, considere \(c = \gamma = 0\).
Ejemplo
El péndulo invertido es una variación del sistema mostrado en el ejemplo anterior. La diferencia radica en que la base \(p\) no necesita estar controlada y lo único que se desea es estabilizar la horientación vertical de la barra. Este sistema se puede apreciar en la siguiente Figura.
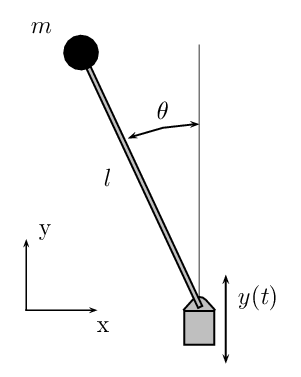
Fig. 11 Sistema de péndulo invertido.#
El sistema de ecuaciones que describe la dinámica del péndulo simple está dado como sigue
donde \(\gamma\) es el coeficiente de fricción rotacional, \(J_{t} = J + ml^{2}\) y \(u\) es la fuerza aplicada a la base.
Formas canónicas de controlabilidad#
Considere el caso general representado en función de transferencia
La forma de realización controlable del sistema anterior es
donde la matriz de controlabilidad puede ser obtenida como sigue
con \(e_{2} := -a_{2} + a_{1}^{2}\) y \(e_{3} := -a_{3} + 2a_{1}a_{2}-a_{1}^{3}\).
Note
La matriz (45) es una matriz triangular cuyo determinante siempre es 1. Por consiguiente, siempre es controlable y es la razón por la que se llama forma controlable.
Estabilización por retroalimentación de estado#
Supongamos que se desea controlar un sistema en representación de espacio de estados lineal. Por simplicidad consideramos que tiene una sola entrada y que la ley de control de retroalimentación parte de la idea de que el sistema en lazo cerrado tiene eigenvalores deseados.
El diagrama mostrado en la Fig. 12 representa un sistema de control que usa retroalimentación de estado. Este sistema constan de un proceso representado por un modelo lineal, los elementos del control denotados por \(K\) y \(k_{r}\), una señal de referencia \(r\) y perturbaciones \(d\). El objetivo de control por retroalimentación es regular la salida del sistema.
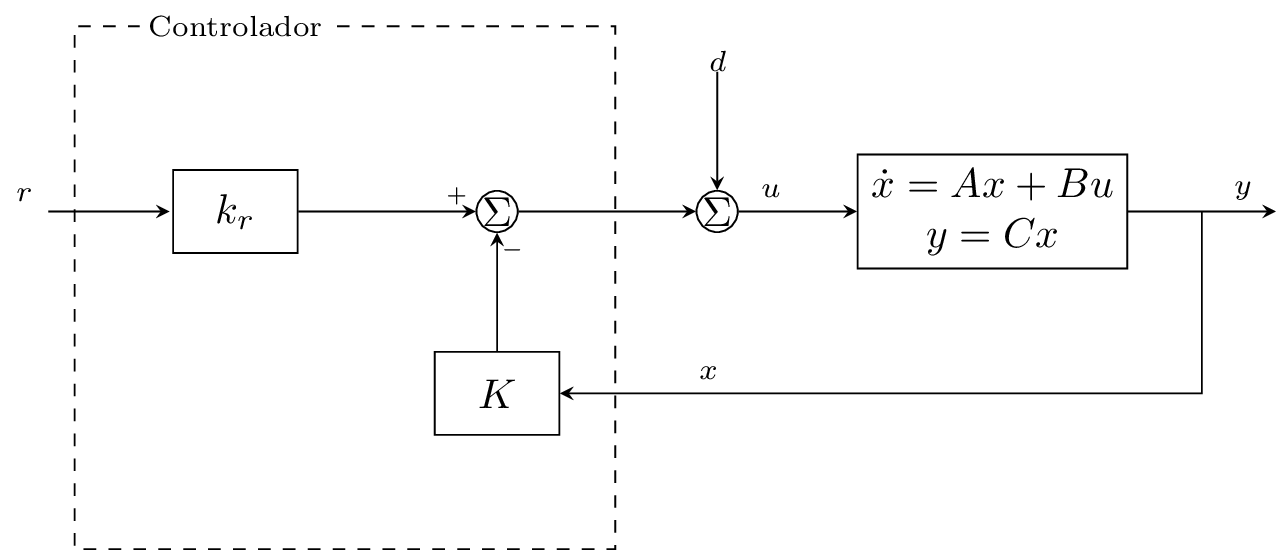
Fig. 12 Sistema de control con retroalimentación de estado donde el controlador utiliza el estado \(x\), la entrada de referencia \(r\) y la entrada \(u\). Aquı́ la perturbación está dada a través de \(d\).#
Entonces, considere el siguiente sistema \(n\)-dimensional en representación de espacio-estado
con función de transferencia
El objetivo es llevar la salida \(y\) al valor de referencia \(r\) a partir de la medición de los estados \(x\). Para ello, consideramos que la ley de control invariante en el tiempo definida como \(u\) es una función del estado y la referencia como se muestra a continuación
donde \(K = \begin{bmatrix} k_{1} & k_{2} & \cdots & k_{n} \end{bmatrix}\) es un vector real de dimensión \(1\times n\).
La ecuación (47) es conocida como retroalimentación de estado de ganancia constante o simplemente retroalimentación de estado [Åström and Murray, 2021].
Sustituyendo (47) en (46), tenemos
con función de transferencia
con polinomio caracteristico
El cálculo de la ganancia de retroalimentación \(K\) para que el sistema de lazo cerrado con polinomio (48) se conoce como asignación de eigenvalores o localización de polos.
Por otro lado, si consideramos el esquema de control mostrado en la Fig. 12, tenemos la siguiente ley de control
donde el sistema en lazo cerrado se expresa como sigue
Note
Es evidente que \(k_{r}\) no afecta la estabilidad del sistema ya que esta está determinada por los eigenvalores del \(A-BK\).
Los puntos de equilibrio del sistema en lazo cerrado está dado por la siguiente expresión
donde \(k_{r}\) es escogida tal que \(y_{e} = r\). Además, dado que \(k_{r}\) es un escalar, podemos obtenerlo a partir de la siguiente expresión
Procedimiento para la asignación de eigenvalores#
Calcule el polinomio característico de \(A:\Delta (\lambda) = \text{det}(\lambda I-A)\).
Calcule el polinomio característico deseado
Calcule la ganancia de retroalimentación para la ecuación equivalente en la forma controlable
Calcule la transformación equivalente
Calcule la ganancia de retroalimentación \(k=\bar{k}P = \bar{k}S^{-1}\).
Note
Existen otras formas para obtener la ganancia de retroalimentación \(k\), una de ellas es la fórmula de Ackerman dada por la siguiente ecuación
donde \(\bar{\Delta}(s)\) es el polinomio característico de \((A-Bk))\), por lo tanto \(\bar{\Delta}(A) \neq 0\).
Note
Si \((A,B)\) es controlable, entonces los eigenvalores de \((A-Bk)\) pueden ser asignados arbitrariamente escogiendo una ganancia de retroalimentación real \(k\).
Ejemplo
Considere el siguiente sistema en representación de espacio de estados
cuya función de transferencia es
Encuentre la ganancia de retroalimentación \(k\) en \(u=r-kx\) tal que la ecuación resultante tenga sus eigenvalores en \(-2\pm j2\).
Ejemplo
Considere el problema de regular la población de un ecosistema mediante la modulación del suministro de alimentos. Para ello considere el modelo depredador-presa cuya dinámica está dada por las siguientes ecuaciones
En este sistema, \(r\) denota la tasa de crecimiento de las liebres, \(k\) la población máxima, \(a\) el término que describe la disminución de las liebres en función de la población, \(c\) representa la tasa de consumo de presas, \(b\) el coeficiente de crecimiento de los linces y finalmente \(d\) la tasa de mortalidad de los linces.
Ejemplo
Considere el problema del carro-péndulo dado por la Ec. (44)
donde \(\mu = M_{t}J_{t} - m^{2}l^{2}\) y \(\gamma=c\neq0\).
Para este ejercicio, utilice los parámetros presentados en la siguiente Tabla, demuestre que el sistema es controlable y que además, es posible utilizar la estrategia de control por retroalimentación de estado para estabilidar el sistema.
Variable |
Valor |
Unidades |
|---|---|---|
M |
10 |
kg |
m |
80 |
kg |
c |
0.1 |
N s/m |
J |
100 |
kg m \({}^{2}\) /s \(^{2}\) |
l |
1 |
m |
Y |
0.01 |
N m s |
g |
9.81 |
m/s \({}^{2}\) |
Ejemplo
Considere un vehículo de dos ruedas como se muestra en la Fig. 13
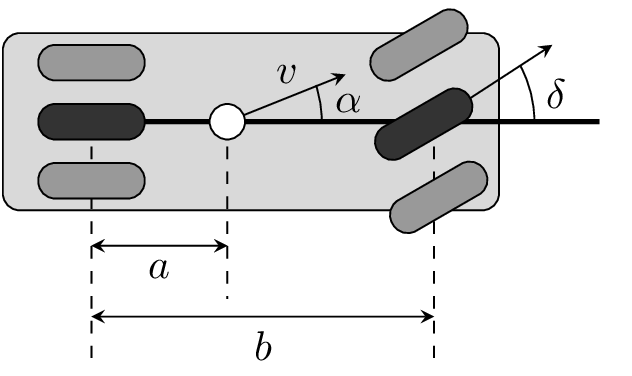
Fig. 13 Dirección del vehı́culo: modelo de bicicleta#
Nuestro interés es analizar cómo la velocidad del vehículo depende del ángulo de dirección \(\delta\). Para ello, consideramos que \(v\) representa la velocidad en el centro de la masa, \(a\) la distancia de la rueda trasera, y \(b\) la base de la rueda.
Sean \(x\) e \(y\) las coordenadas del centro de masa, \(\theta\) en ángulo de rumbo y \(\alpha\) el ángulo entre el vector de velocidad \(v\) y la línea central del vehículo, entonces la relación entre \(\alpha\) y el ángulo de dirección \(\delta\) está dada como sigue
donde \(a := r_{a}\tan(\alpha)\), \(b:= r_{a} \tan(\delta)\).
Asuma que las ruedas no patinan y que la velocidad de las ruedas traseras es \(v_{0}\), entonces la velocidad del vehículo en su centro de masa es \(v=v_{0}/\cos(\alpha)\). Por consiguiente, el movimiento de este punto está dado como sigue
El ángulo \(\theta\), afectado por el ángulo de dirección está dado por la siguiente relación
Asuma que \(\delta = 0\) y \(\dot{\theta} = 0\) para encontrar el punto de equilibrio del sistema y proceda a linealizar (51).
Respuesta de estado estacionario#
Considere un sistema entrada-salida lineal como se muestra en la siguiente expresión
donde su solución se puede obtener a partir de la ecuación de convolución
Como se puede observar, la respuesta del sistema depende de una condición inicial \(x_{0}\) y una entrada \(u\). Además, es posible observar que en esta expresión existen dos componentes: la respuesta transitoria y la respuesta de estado estable. La primera ocurre cuando se aplica una entrada y se observa un desajuste entre la condición inicial y la solución de estado estable. La segunda refleja el comportamiento del sistema bajo las entradas dadas. En la Fig. 14 podemos ver estos dos componentes en respuesta ante una entrada de tipo escalón unitario.
Note
En la práctica, se espera que si la entrada es periódica la respuesta también lo sea. Lo mismo con entradas constantes.
Un escalón unitario, entrada escalón o escalón de Heaviside es una función definida a pedazos como sigue
Definimos entonces como respuesta escalonada a la salida \(y(t)\) a partir de una condición inicial en el punto de equilibrio del sistema y una entrada \(u(t)\) de la forma (53).
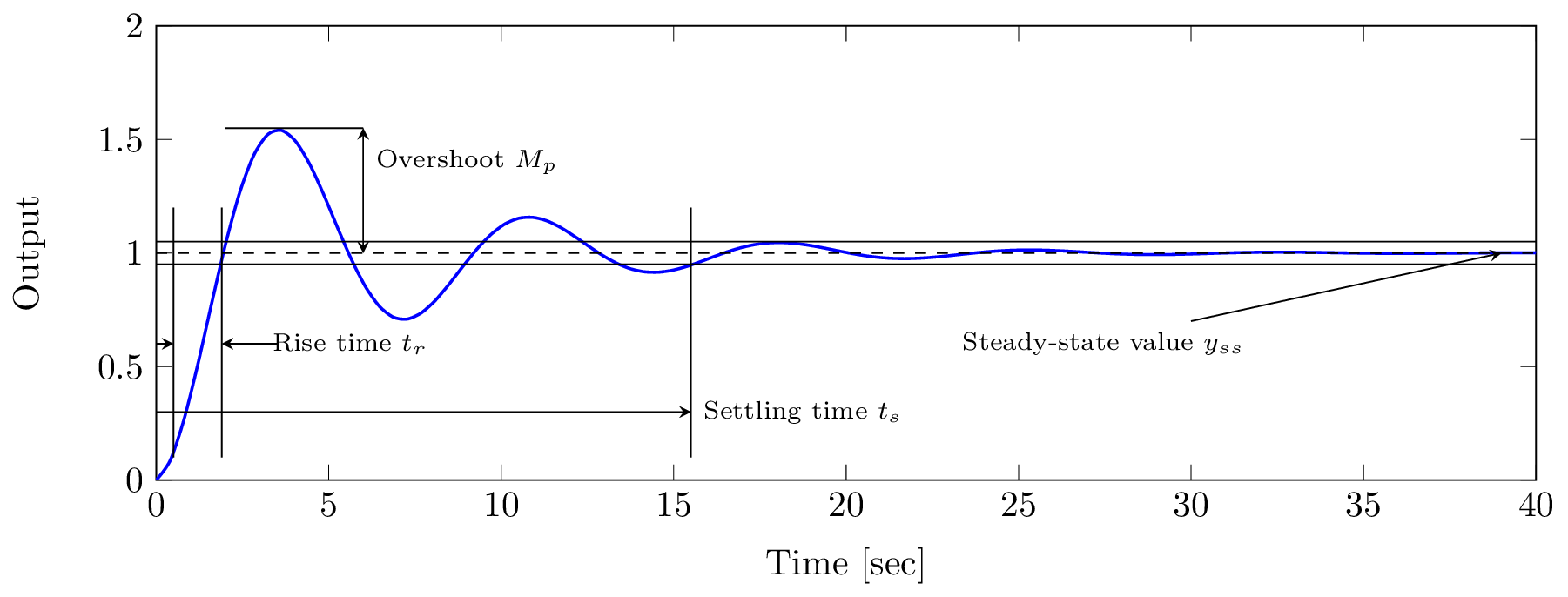
Fig. 14 Respuesta del sistema ante una entrada tipo escalón. Se observa el tiempo de subida (Rise time), sobretiro (Overshoot), tiempo de asentamiento (Settling time) y valor en estado estable (Steady-state value).#
Utilizando la ecuación de convolución \eqref{eqn:conv_eq}, podemos calcular la respuesta ante una entrada tipo escalón considerando \(x_{0}=0\). Entonces, tenemos
o bien
Velocidad de respuesta#
Definimos como rendimiento transitorio a la velocidad de respuesta o la velocidad en la que el sistema alcanza al estado estable. Generalmente se especifica en términos de tiempo de levantamiento (rise time), tiempo de asentamiento (settling time) y sobretiro (overshoot). El tiempo de levantamiento lo definimos como el tiempo requerido para la respuesta pase de 0 al 90% del valor en estado estacionario como se muestra en la Fig. 14. En otras palabras, buscamos el valor más pequeño \(t_{r}\) tal que
donde \(t_{s}\) denota el \myindex{tiempo de asentamiento}. Es decir, el tiempo que le toma a la respuesta del sistema alcanzar y mantenerse dentro del \(\pm 2\%\) de su valor en estado estable, o bien, el valor más pequeño \(t_{s}\) tal que
Sea \(y_{\max}\) el valor máximo de \(\left|y(t) \right|,~\forall t\geq 0\) o bien
entonces el sobretiro se define como sigue