Sistemas de ecuaciones diferenciales lineales#
Resortes acoplados#
Dos masas \(m_{1}\) y \(m_{2}\) se encuentran conectadas a dos resortes \(A\) y \(B\) de masa despreciable con constantes de resorte \(k_{1}\), \(k_{2}\). Si \(x_{1}(t)\) y \(x_{2}(t)\) representan los desplazamientos verticales de las masas desde sus posiciones de equilibrio podemos representar la elongación neta del resorte \(B\) por la expresión \(x_{2} - x_{1}\).
A partir de la ley de Hooke tenemos que los resortes \(A\) y \(B\) ejercen fuerzas \(-k_{1}x_{1}\) y \(k_{2}\left(x_{2} - x_{1} \right)\) en \(m_{1}\). Ante la ausencia de fuerzas externa y amortiguamiento, la fuerza neta en la masa \(m_{1}\) está representada por \(-k_{1}x_{1} + k_{2}\left(x_{2} - x_{1} \right)\). Por la segunda ley de Newton se tiene
Para el caso de la masa \(m_{2}\) sólo se ve afectada por la elongación neta de \(B\), esto es \(-k_{2}\left( x_{2} - x_{1} \right)\). Por tanto se obtiene
Entonces, el sistema de ecuaciones diferenciales de segundo orden que describen el movimiento del sistema acoplado está dado por
Ejemplo
Considere las siguientes masas \(m_{1} = m_{2} = 1\), y constantes de resorte \(k_{1}=6\), \(k_{2} = 4\). Resuelva el sistema de ecuaciones considerando las condiciones iniciales \(x_{1}(0)=0\), \(x'_{1}(0)=1\), \(x_{2}(0)=0\), \(x'_{2}(0)=-1\).
Red eléctrica#
Las corrientes \(i_{1}(t)\) e \(i_{2}(t)\) de una red que contiene un inductor, un resistor y un capacitor están gobernadas por el siguiente sistema de ecuaciones diferenciales de primer orden
Considere las siguientes condiciones \(E(t) = 60\) V, \(L=1\) h, \(R=50~\Omega\), \(C=10^{-4}\) f. Además, tome en cuenta que al inicio las corrientes \(i_{1} = i_{2} = 0\).
Péndulo simple#
Considere el péndulo simple mostrado en la siguiente
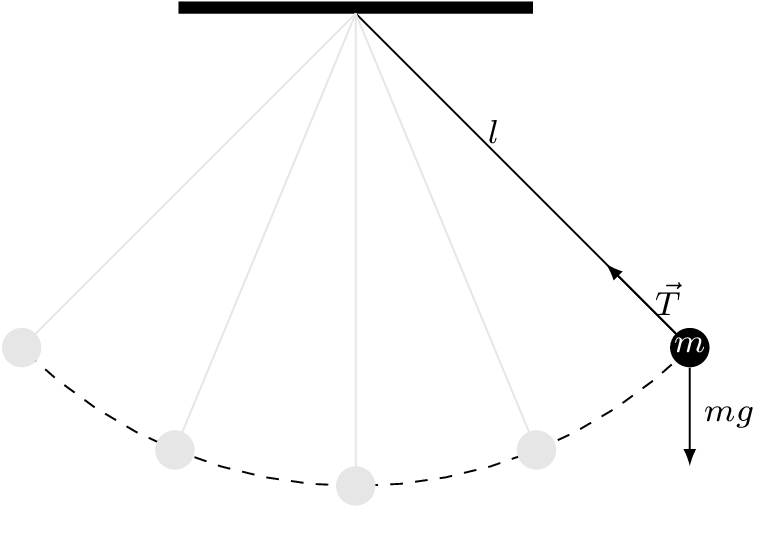
Figura 3 Diagrama de péndulo simple sin fuerza externa.#
donde \(l\) denota la longitud de la varilla, y \(m\) la masa de la bola.
Cuya representación en espacio de estados está dada como sigue