Función de transferencia#
Considere un sistema lineal invariante en el tiempo (LTI) cuya función de transferencia es \(G(s)\) y la entrada así como la salida se representan por \(x(t)\), \(y(t)\), respectivamente. Dicha función se puede escribir como el cociente de dos polinomios en \(s\), esto es
o bien
La transformada de Laplace de la salida \(Y(s)\) es
donde \(X(s)\) es la transformada de Laplace de la entrada \(x(t)\).
La respuesta en estado estacionario de un sistema estable LTI a una entrada sinusoidal no depende de las condiciones iniciales. Considerando que \(Y(s)\) tiene únicamente polos distintos (simples), la ecuación anterior se puede representar en fracciones parciales como sigue
donde \(a\) y \(b_{i},i=1,2,\dots,n\) son constantes y \(\bar{a}\) es el complejo conjugado de \(a\).
Por consiguiente, si aplicamos la transformada inversa de Laplace a la Ec. (3) tenemos
Función de transferencia propia#
Considere la siguiente función de transferencia
donde \(N(s)\) y \(D(s)\) son dos polinomios con coeficientes reales, entonces tenemos
Función impropia. El \(\text{deg }N(s) > \text{deg }D(s)\).
Función propia. El \(\text{deg }N(s) \leq \text{deg }D(s)\).
Función estrictamente propia. El \(\text{deg }N(s) < \text{deg }D(s)\).
Función bipropia. El \(\text{deg }N(s) = \text{deg }D(s)\).
Polos y zeros#
Considere una función de transferencia racional propia
donde \(N(s)\) y \(D(s)\) son polinomios con coeficientes reales y \(\text{deg }N(s) \leq \text{deg }D(s)\).
Definition 18
Un número complejo o real finito \(\lambda\) es un polo de \(G(s)\) si \(|G(s)| = \infty\), donde \(|\cdot|\) denota el valor absoluto. Por otro lado, si \(G(\lambda)=0\) entonces es un zero de \(G(s)\).
Ejemplo
Considere la siguiente función de transferencia
obtenga sus polos y zeros.
Ejemplo
Sea \(u(t)=1\) con \(t\leq 0\) la respuesta de escalón unitario, calcule la respuesta de estado cero de la siguiente función de transferencia
Estabilidad de sistemas#
Sistema absolutamente estable. Todos los polos del sistema estén estrictamente en el semi-plano izquierdo, sin importar la multiplicidad.
Sistema marginalmente estable. Al menos un polo está sobre el eje imaginario con multiplicidad uno y el resto están estrictamente en el semi-plano izquierdo, sin importar la multiplicidad.
Sistema inestable. Al menos un polo está sobre el eje imaginario con multiplicidad mayor a uno o en el semiplano derecho.
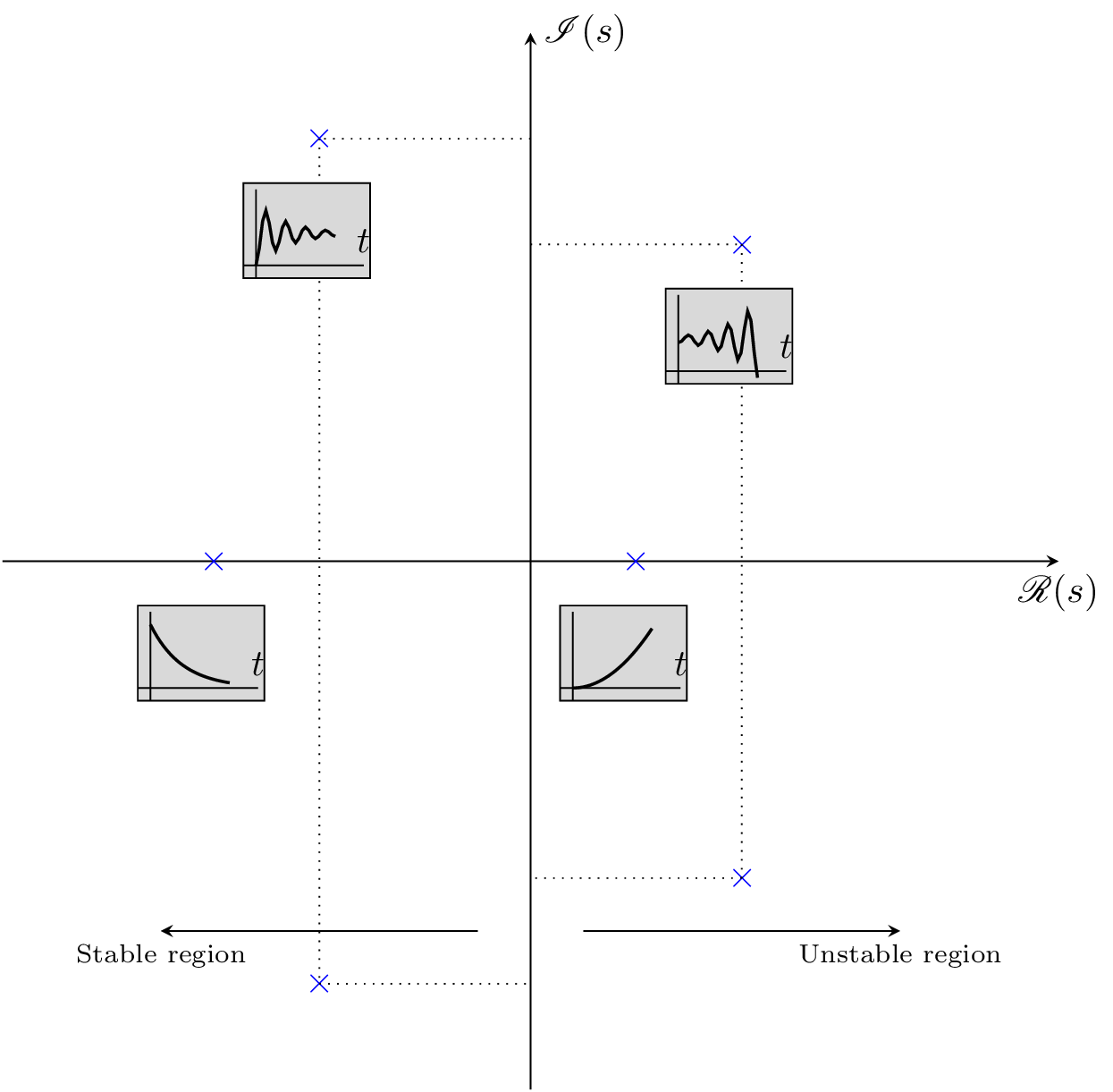
Figura 1 Mapa de polos y zeros.#