Respuesta de estado estacionario#
Considere un sistema entrada-salida lineal como se muestra en la siguiente expresión
donde su solución se puede obtener a partir de la ecuación de convolución
Como se puede observar, la respuesta del sistema depende de una condición inicial \(x_{0}\) y una entrada \(u\). Además, es posible observar que en esta expresión existen dos componentes: la respuesta transitoria y la respuesta de estado estable. La primera ocurre cuando se aplica una entrada y se observa un desajuste entre la condición inicial y la solución de estado estable. La segunda refleja el comportamiento del sistema bajo las entradas dadas. En la Figura 16 podemos ver estos dos componentes en respuesta ante una entrada de tipo escalón unitario.
Nota
En la práctica, se espera que si la entrada es periódica la respuesta también lo sea. Lo mismo con entradas constantes.
Un escalón unitario, entrada escalón o escalón de Heaviside es una función definida a pedazos como sigue
Definimos entonces como respuesta escalonada a la salida \(y(t)\) a partir de una condición inicial en el punto de equilibrio del sistema y una entrada \(u(t)\) de la forma (54).
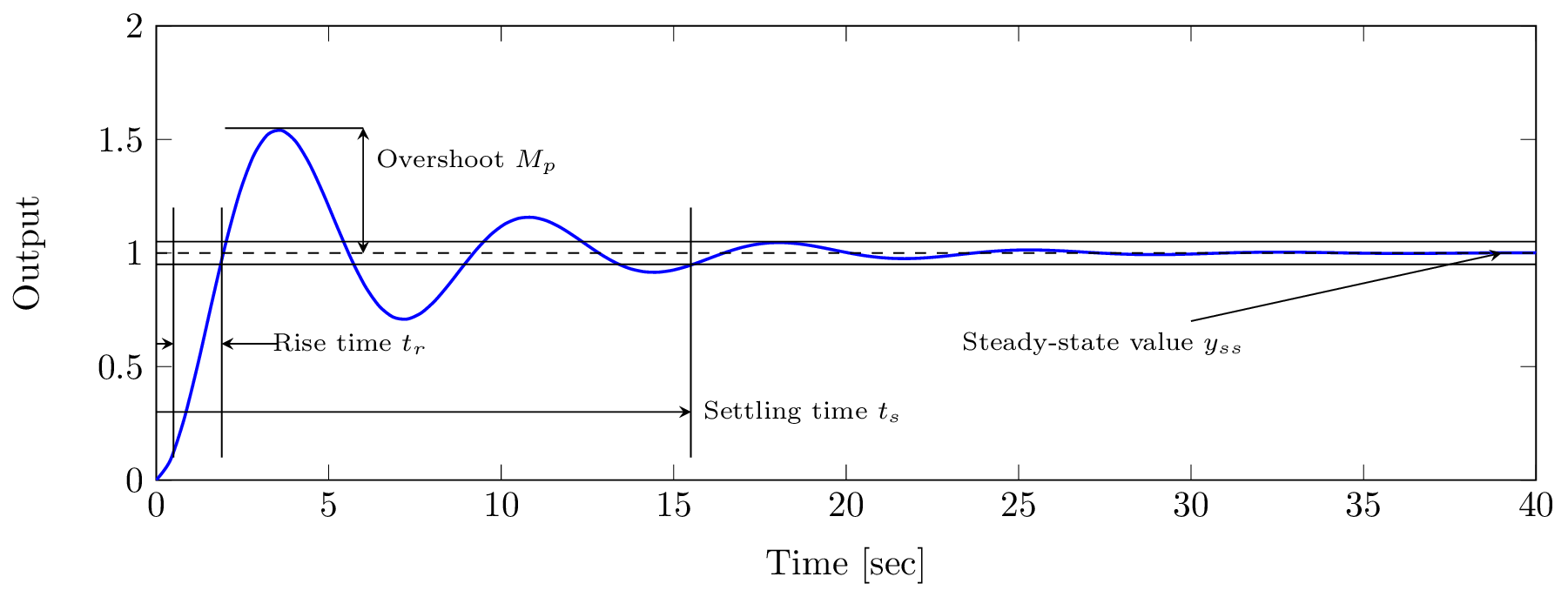
Figura 16 Respuesta del sistema ante una entrada tipo escalón. Se observa el tiempo de subida (Rise time), sobretiro (Overshoot), tiempo de asentamiento (Settling time) y valor en estado estable (Steady-state value).#
Utilizando la ecuación de convolución \eqref{eqn:conv_eq}, podemos calcular la respuesta ante una entrada tipo escalón considerando \(x_{0}=0\). Entonces, tenemos
o bien
Velocidad de respuesta#
Definimos como rendimiento transitorio a la velocidad de respuesta o la velocidad en la que el sistema alcanza al estado estable. Generalmente se especifica en términos de tiempo de levantamiento (rise time), tiempo de asentamiento (settling time) y sobretiro (overshoot). El tiempo de levantamiento lo definimos como el tiempo requerido para la respuesta pase de 0 al 90% del valor en estado estacionario como se muestra en la Figura 16. En otras palabras, buscamos el valor más pequeño \(t_{r}\) tal que
donde \(t_{s}\) denota el \myindex{tiempo de asentamiento}. Es decir, el tiempo que le toma a la respuesta del sistema alcanzar y mantenerse dentro del \(\pm 2\%\) de su valor en estado estable, o bien, el valor más pequeño \(t_{s}\) tal que
Sea \(y_{\max}\) el valor máximo de \(\left|y(t) \right|,~\forall t\geq 0\) o bien
entonces el sobretiro se define como sigue